
AMR Manual Control
AMR Manual Control
The Pendant
The Pendant Connection Port
The pendant connection port is found inside the Pendant and Manual Charge Port Bay. To access the port, push on the Pendant and Manual Charge Port Bay door. Remove the pendant port terminator plug to use the port. Return the pendant port terminator plug to the port prior to changing the system to autonomous mode, otherwise the system will remain in an Emergency Stop state.
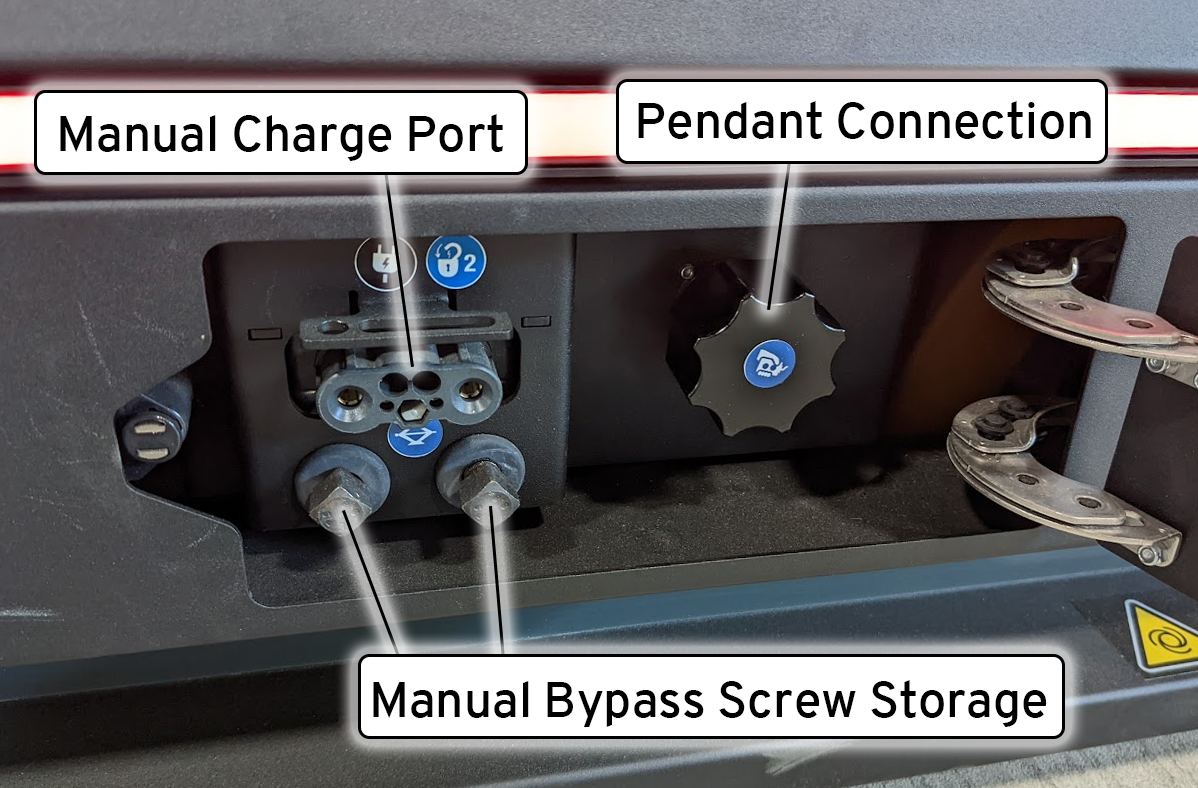
Manual Bypass
In the event of having to manually bypass the drive wheels on the robot, the manual bypass screws should always be accessible, including when there is an attachment in place. The manual bypass screws are stored inside the Pendant and Manual Charge Port Bay when not in use.
- Ensure that the robot will not shift suddenly or roll when the drive wheels disengage with the floor. The robot will no longer be able to brake once the drive wheels lose contact with the floor.
- Using a 15 mm 12-point socket, turn the manual bypass screws clockwise until the drive wheels lift up and away from the floor at least 10 mm.
- Once the drive wheels are bypassed, the robot can be easily moved on its swivel casters by pushing or pulling the robot in the desired direction.